

 VOLVER A LOS ARTÍCULOS
VOLVER A LOS ARTÍCULOS
Mecatrónica
La mecatrónica es la ciencia que estudia a los robots. Otros autores la definen como la integración de la ingeniería mecánica y eléctrica para el diseño de computadores inteligentes.
¿Sabías qué?
En abril de 2015, Curiosity descubrió que las condiciones ambientales de Marte por la noche permiten la existencia de agua salada en el cráter Gale.
Órbita planetaria
Se define como el trayecto que sigue un planeta alrededor del sol. Las órbitas planetarias de los planetas que componen el sistema solar tienen forma elíptica.
¿Sabías qué?
La sonda espacial Voyager 1 lanzada por la NASA en 1977 se encuentra más lejos del Sol que Plutón.
Las misiones espaciales pueden resultar peligrosas para el ser humano, es por ello que las agencias espaciales de distintos países se han propuesto diseñar una serie de robots espaciales con tecnología avanzada para descubrir los misterios del universo.

¿QUÉ SON LOS ROBOTS ESPACIALES?
Los robots espaciales son sistemas electrónicos integrados con control automático que ayudan, e incluso sustituyen a los seres humanos en misiones espaciales. Son capaces de realizar movimientos complejos con alta precisión y reproducibilidad, y además son flexibles.
Los robots espaciales son diseñados para soportar las condiciones fuera de la Tierra, por lo tanto deben cumplir los siguientes requerimientos:
DEL CINE A LA REALIDAD
El Asistente portátil satelital (PSA) es un robot del tamaño de una pelota de voleibol, fue diseñado por la NASA para facilitar el trabajo de los astronautas en distintas naves espaciales. El PSA puede movilizarse y flotar en la estación espacial gracias a sus impulsores, también es capaz de analizar la composición del aire, determinar la temperatura, alertar a los astronautas de algún problema en el equipo de la nave espacial y los pasos a seguir para la resolución del mismo.
¿CÓMO SE CLASIFICAN LOS ROBOTS ESPACIALES?
Los robots espaciales, según su funcionalidad y sus características, pueden ser clasificados de distintas formas.
Robots internos
Se utilizan para automatizar los experimentos realizados dentro de la estación espacial.

Un dato curioso del PSA es que está inspirado en la película Star Wars.
Robots humanoides de apoyo
La Agencia Espacial de Cánada diseño el primer robot humanoide de apoyo, el cual se denominó Canadarm. Este robot es un brazo manipulador que se utilizó en el transbordador espacial de Shuttle hasta el año 2011. Durante su periodo operativo colaboró en diversas actividades extravehiculares de mantenimiento, ensamblaje y reparación.
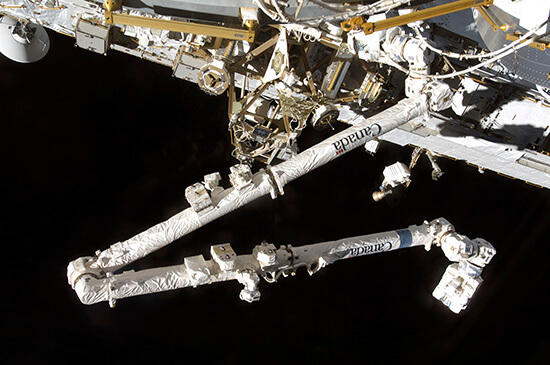
Canadarm 2 es una versión más grande y sofisticada del Canadarm utilizada en la Estación Espacial Internacional.
Por su parte, Robonaut es un robot humanoide enviado por la NASA a la Estación Espacial Internacional en el año 2011 con el fin de realizar las tareas diarias propias de un astronauta.

Robonaut está constituido únicamente por: cabeza, torso, brazos y manos.
Robots de exploración
Son robots móviles con cierto grado de autonomía que aterrizan dentro de una nave espacial en el lugar de exploración y poseen instrumentos científicos para analizar el terreno y sus condiciones.
MISIONES ESPACIALES NO TRIPULADAS
Las misiones espaciales no tripuladas se llevan a cabo con naves espaciales robóticas sin humanos a bordo. Su objetivo es contribuir con datos científicos sobre planetas, satélites y asteroides, entre otros elementos del sistema solar. Las naves espaciales empleadas en este tipo de misiones se denominan sondas espaciales.
PLUTÓN NO ESTÁ TAN LEJOS
La sonda espacial New Horizons fue lanzada en el año 2006 por la NASA con destino a Plutón. Esta sonda espacial viajo casi 10 años hasta que el 14 de julio de 2015 sobrevoló a 12.472 Km de la superficie de Plutón convirtiéndose en la primera misión no tripulada en explorar el mencionado cuerpo celeste. Por si no fuera suficiente llegar a Plutón, se prevé que New Horizons luego de explorar dicho planeta enano viaje hasta el cinturón de Kupier.

New Horizons es la primera misión de la NASA en alcanzar Plutón.
Pueden estar constituidas por una sonda orbital, una sonda de aterrizaje o robots de exploración. Según el objeto de exploración, las misiones espaciales no tripuladas más conocidas pueden dividirse en:
MISIONES EXPLORATORIAS EN LA LUNA
Programa Lunokhod
Conformado por dos robots exploradores: Lunokhod 1 y Lunokhod 2 enviados a la Luna por la agencia espacial de la desaparecida Unión Soviética en 1970 y 1973 respectivamente. El objetivo de estos robots fue explorar la superficie lunar.

Estampilla con el dibujo de Lunokhod. El lanzamiento de Lunokhod 3 estaba programado en 1977, sin embargo dicho robot nunca dejó la Tierra.
Programa Espacial Chino
El programa está conformado por las siguientes fases:
Primera fase: constituido por dos sondas orbitales llamadas Chang´e 1 y Chang´e 2. La primera de ellas se estrelló con la Luna en el 2009, luego de estar operativa por más de un año.
Segunda fase: la conforman dos sondas de aterrizaje denominadas Chang´e 3 y Chang´e 4.
Hasta la fecha solo Chang´e 3 ha sido lanzada, en ella viajaba el robot explorador Yutu que pisó superficie lunar el 14 de diciembre de 2013, su misión fue estudiar la geología y topografía de la superficie lunar.
Tercera fase: compuesta por la sonda espacial Chang´e 5 cuyo objetivo es recolectar muestras de la superficie lunar y traerlas a la Tierra.
Chang´e 5 retornó a la Tierra en noviembre de 2020 con cerca de 2 kg de muestras de suelo lunar.
MISIONES EXPLORATORIAS EN MARTE
Desde 1965, cuando la sonda espacial Mariner 4 envió las primeras imágenes del planeta Marte el interés de la humanidad por esté planeta no hizo sino aumentar. El éxito de esta misión marcaría el inicio de una serie de misiones espaciales.
Programa Viking
Las misiones Viking I y Viking II fueron ejecutadas en el año 1975 y constituyeron el primer programa estadounidense de aterrizaje en Marte. Cada misión estuvo conformada por una sonda de orbital y una sonda de aterrizaje.
Entre los principales descubrimientos y aportes científicos del programa se pueden citar los siguientes:
• La presencia de volcanes, llanuras y cráteres.
• Evidencia de procesos de erosión por viento y agua.
• Las temperaturas registradas estuvieron en el intervalo de: -123 °C a -23 °C.
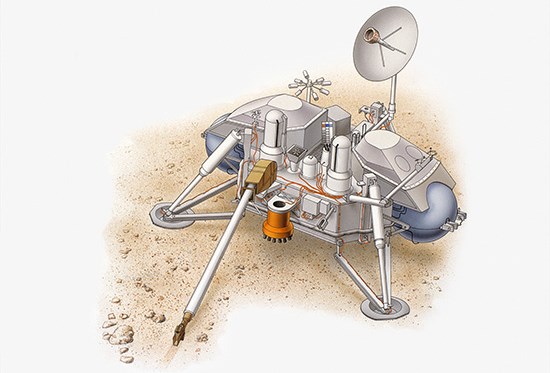
El programa Viking permitió determinar que la atmósfera de Marte se compone principalmente de CO2.
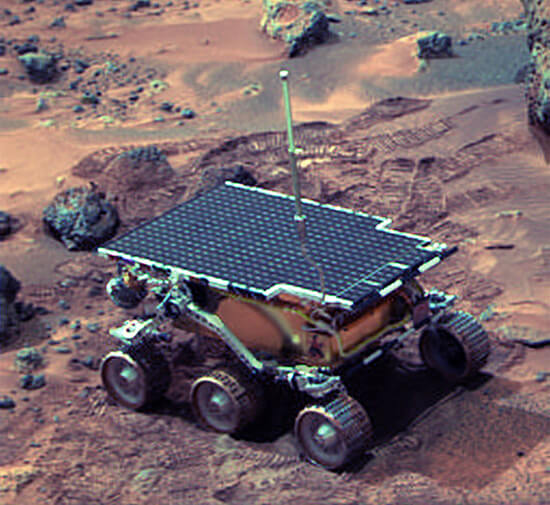
Misión Mars Pathfinder
Fue la primera misión espacial de la NASA que utilizo un vehículo robótico de exploración, también logró demostrar que era posible enviar robots equipados con instrumentos científicos a Marte.
El robot Sojourner aterrizó en la superficie de Marte el 4 de julio de 1997. Sojourner estuvo activo durante 83 días, en los cuales recolectó diversas imágenes y evidencias que permiten inferir que Marte poseía en el pasado un clima húmedo y cálido.
19 AÑOS EN LA ORBITA DE MARTE
El 15 de diciembre de 2020, la sonda espacial Mars Odyssey se convirtió en la nave espacial con mayor tiempo en la órbita de Marte, un récord que supera día a día, pues esta nave sigue operativa y funciona como enlace entre los robots exploradores que se encuentran en la superficie marciana y la Tierra. En el 2001 la nave espacial fue lanzada con el objetivo de realizar un mapa topográfico del planeta Rojo, el descubrimiento de hielo de agua bajo la superficie de dicho planeta fue uno de sus logros más importantes.
La sonda espacial Mars Odyssey cuenta con tres instrumentos científicos: un sistema de representación por emisión térmica (THEMIS), un espectrómetro de rayos gamma (GRS) y un equipo de Experimento de Radiación al Medio Ambiente (MARIE).
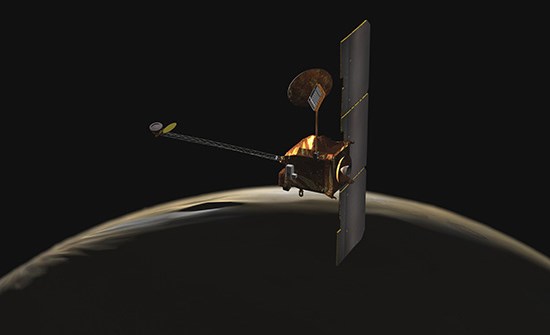
El 23 de junio de 2015, Mars Odyssey completó su órbita número 60.000.
El exitoso descenso de Sojourner en Marte ha provocado que su diseño de aterrizaje siga siendo utilizado.
Programa Mars Exploration Rover
El programa está constituido por dos vehículos robóticos de exploración idénticos, es decir, robots gemelos conocidos como: Spirit y Opportunity. El objetivo fue colocar a los robots en puntos equidistantes del planeta Marte, para investigar y caracterizar la superficie marciana.

El programa sigue en curso gracias a la resistencia del robot Opportunity que lleva más de 11 años en Marte.
Las evidencias científicas recolectadas en esta misión permitieron inferir a los científicos que Marte en algún momento estuvo cubierto de agua debido a la presencia de diversos minerales cuya formación ocurre en presencia del líquido esencial para la vida tal y como la conocemos.
Misión Curiosity
Curiosity es el robot explorador lanzado a Marte en el año 2011 por la NASA, su misión consiste en:
• Determinar la geología de la superficie marciana.
• Caracterizar las condiciones atmosféricas de Marte.
• Estudiar las variaciones climáticas y encontrar evidencias científicas de vida.

El éxito de Curiosity podría significar un paso más hacia futuras misiones tripuladas en el planeta Marte.
| EVOLUCIÓN EN EL DISEÑO DE LOS ROBOTS EXPLORADORES EN MARTE | ||||
|---|---|---|---|---|
| Sojourner | Spirit | Opportunity | Curiosity | |
|
Fecha de lanzamiento |
04/12/1996 |
10/06/2003 |
7/07/2003 |
26/11/2011 |
|
Fecha de aterrizaje |
04/07/1997 |
4/01/2004 |
25/01/2004 |
06/08/2012 |
|
Fecha de culminación |
27/09/1997 |
22/03/2010 |
— |
|
|
Peso |
10,6 kg |
185 kg |
900 kg |
|
|
Dimensiones |
65 cm de largo, 48 cm de ancho y 30 cm de altura |
1,7 m de largo, 2,3 m de ancho y 1,5 m de altura |
3 m de largo, 2,7 m de ancho y 2,2 m de altura |
|
|
Instrumentos científicos |
1 espectrómetro 3 cámaras |
1 cámara microscópica 3 espectrómetros 1 herramienta de abrasión de rocas (RAT) |
4 cámaras 1 sensor atmosférico 1 sensor ambiental 2 detectores de radiación 4 espectrómetros |
|


